轨道式集装箱吊钩两用门式起重机控制方案
发布:hnhjgk0.1浏览:9759次

一、项目概况
本方案书用于轨道式集装箱(吊钩)两用门式起重机(简称门吊)的集装箱、长大笨重货物的作业。起重型号及规格:Gn=50t,S=30m。
(1)作业范围
本起重机主要用于陇西铁路货场集装箱和长大笨重货物的装卸作业。
(2)基本要求
A.整体结构
1) 起重机的额定起重量:40.5t(吊具下),50t(吊钩下);起重机的走行轨的轨距为:30m。
2) 大车运行距离380m。
3) 小车跨度为14m。
4) 配备3t以下检修葫芦吊。
5) 检修平台架设在端梁,并贯穿整个端梁。
6) 起升高度12.5m(自吊具底部计算),确保集装箱能够堆三过四。
B.大车、小车部分
1) 大车轮径采用Φ800mm,大车采用16轮运行,8轮驱动,单个电机功率不小于11kw。
2) 大车工作制动与防风制动应分开布局。(设置轮边制动器为工作制动,设置防风拉锁、锚定装置为非工作制动)
C.吊具部分
本起重机需配备1套适用于20ft、40ft国际标准集装箱伸缩式吊具,1个20ft国际标准集装箱普通吊具,1个40ft国际标准集装箱普通吊具。
本方案按照国家标准和技术规格书使用要求,承做的Gn50t-S30m轨道式集装箱门式起重机的主要特性、技术条件及使用等,做出具体的规定和说明。
1.1、门机电气系统采用 “PLC(可编程控制器)+变频传动+触摸屏监控”组成的电气控制系统。
1.2 、PLC实现整车的逻辑控制,采用SIEMENS公司S7系列产品,通过PROFIBUS DP总线通讯将各个变频控制系统与PLC连接,实现数据交换。
变频传动驱动各机构协调动作,实现平稳可控运行,变频器采用安川变频器。
触摸屏监控实现对整机状态监控和故障诊断,触摸屏采用SIEMES公司触摸屏。
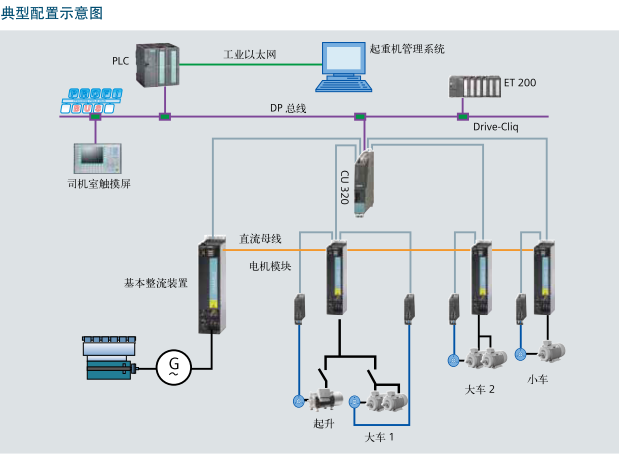
图1:电气系统网络拓扑图
1.3、优点
1.3.1、**的电机控制有效降低机械磨损:变频器可**控制电机的转矩,无级调速,实现机构的零速抱闸,使机械冲击降至*低,有效延长设备的使用寿命;
1.3.2、强大的通讯总线使控制系统简洁并具有更高的控制性能:PROFIBUS DP总线的使用使电气设备间控制电缆的数量极大减少,使系统的可靠性大大增加,且为系统的智能故障诊断提供了大量的诊断原始数据;
1.3.3、实时的状态监视及智能的故障智诊断:采用触摸屏监控系统运行,使系统具备实时的状态监控画面,且能进行智能故障诊断;
2.1、供电电源:380V 50HZ,三相四线交流电源
2.2、供电回路保护:设有过载、短路、过流、过压、欠压、过热、漏电、失压、缺相、错相等可靠的电气保护措施。
2.3、安全保护:各通道门设有限位开关,在司机室、小车架、主梁中部、电气房、柔性腿台车、刚性腿台车处设有急停开关,以保证有人员通过和急停开关动作时设备不能运行。
3.1、门机传动系统采用安川CH700内置防摇软件系列起重专用变频器,对各机构电机进行驱动控制。变频器与可编程控制器(PLC)以PROFIBUS DP总线的方式实现机构的自动化控制,以实现生产工艺控制要求。
3.2.1、安川CH700系列变频器是安川公司*新推出的重负载变频器,在重型工业领域发挥稳定出众。
**的过力矩能力:可达150%60s过载能力;
3.2.2、零速高转矩:由CH700带动的电机在零速能够获得在时电机150%-200%额定转矩,可以确保电机在启动、减速、停车时平稳性;
3.2.3、控制精度高,动态响应性能**:动态转速误差在开环应用时为±0.2%,在闭环应用时为±0.01%;
3.2.4、调速范围广,开环时达到1:100,闭环时到达1:1500;
3.2.5、完善的保护功能:包括瞬时过电流保护、瞬时断电失压保护、接地保护、冷却风机异常、超频(超速)保护、缺相、超载、过热等保护。
4.1、起升机构为典型位能负载,采用一台台CIMR-CH700变频器驱动,以增量型电机旋转编码器构成闭环矢量控制加装DP通讯卡的方式。
4.2、采用编码器主令控制器控制,通过PLC逻辑程序判断给定速度。通过PROFIBUS DP总线对变频器进行速度给定,调速范围1~10m/min。
4.3、钢丝绳卷筒末端加装绝对值编码器,用以判断起升机构的高度。
4.4、起升吊具控制
4.4.1、通过联动台上的操作按钮及选择开关对吊具进行伸缩、旋转、开闭锁操作。
4.5、起升机构保护
4.5.1、超负荷限制器:
4.5.2、超负荷限制器限制超载、偏载,具有控制信号干接点,接入PLC系统参与机构控制。载荷量可在司机室显示屏上显示。仪表带有458接口或模拟量输出接口,安全监控系统可以采集载荷量信号。
4.5.3、超负荷限制器并有如下警告和联锁功能:
4.5.4、当吊具下的载荷达到额定载荷的90%时,司机室内指示灯显示。
4.5.5、当吊具下载荷达到额定载荷的105%时,音响警报器报警,警示灯闪亮并立即切断起升机构的“起升”回路,但能下降操作。
4.6、机械限位保护:
4.6.1、高度限位:用于起升高度的检测与升降预限位、终点限位、极限限位的检测与保护。
4.6.2、高度软限位:通过绝对值编码器测量的高度可以预设多个软限位,如:上限、上升减速1、上升减速2、下降减速1、下降减速2、下限等用于起升机构的控制和保护。
4.6.3、超速保护:超速开关对起升机构进行超速检测与保护,当电机速度超过115%时,电动机断电,直接进行紧急制动。
4.7、集装箱专用吊具的检测与保护如下:
4.7.1、通过吊具上的检测限位(开锁、闭锁限位、顶锁限位、20FT限位、40FT限位)来识别吊具的工作状态;
4.7.2、开锁到位:四个开锁限位开关同时到位;
4.7.3、闭锁到位:四个闭锁限位开关同时到位;
4.7.4、顶销到位:四个顶销限位开关同时到位;
4.7.5、起升机构保护:开锁到位或者闭锁到位时才能进行起升机构上升操作,顶销到位时起升机构停止下降;
4.7.6、吊具伸缩保护:开锁到位,四个顶销限位无到位信号时才能进行伸缩,20FT限位或者40FT限位到时停止;
4.7.7、开锁闭锁保护:顶销到位时才能进行旋锁操作;
4.8、变频器保护功能:包括瞬时过电流保护、瞬时断电失压保护、接地保护、冷却风机异常、超频(超速)保护、缺相、等保护。
4.9、防溜钩保护功能:制动器的工作状态反馈回控制系统,与起升电机的变频驱动系统互锁,有效防止溜钩。
4.10、零位保护功能:机构断电后,操作手柄必须回零后才能启动,防止误操作
4.11、起升电机保护功能:过载、电机过转矩保护:通过变频器的保护功能实现;
5.1、小车行走机构采用一台型号为安川CH700系列变频器对电机进行集中调速,开环控制方式。
5.2、采用编码器主令控制器控制,通过PLC逻辑程序判断给定速度。通过PROFIBUS DP总线对变频器进行速度给定,调速范围4~40m/min。
5.3、小车行走保护
5.3.1、机械限位保护:小车运行机构装有四只重型机械限位开关,用于小车减速限位、停车限位的检测与保护。
5.3.2、小车锚定限位保护:在小车运行之前,小车锚定销应释放,否则,小车将不能运行。
5.3.3、小车电机保护:过载、电机过转矩保护——通过变频器的保护功能实现。
5.3.4、变频器保护功能:包括瞬时过电流保护、瞬时断电失压保护、接地保护、冷却风机异常、超频(超速)保护、缺相等保护。
5.3.5、零位保护功能:机构断电后,操作手柄必须回零后才能启动,防止误操作。
6.1、大车机构采用一台安川CH700系列变频器对电机进行集中调速,开环控制。
6.2、采用编码器主令控制器控制,通过PLC逻辑程序判断给定速度。通过PROFIBUS DP总线对变频器进行速度给定,调速范围4.5~45m/min。
6.3、大车机构的保护
6.3.1、机械限位保护:
6.3.2、大车减速限位、停止限位:大车运行机构装有四只重型机械限位开关,用于大车预减速限位、停止限位的检测与保护。
6.3.3、大车锚定限位:与大行走机构互锁,锚定解除后大车方可工作。
6.3.4、大车防撞限位:在大车2侧装有激光测距传感器,用于大车机构与同轨道大车的防撞。
6.3.5、大车电机保护:过载、电机过转矩保护——通过变频器的保护功能实现。
6.3.6、变频器保护功能:包括瞬时过电流保护、瞬时断电失压保护、接地保护、冷却风机异常、超频(超速)保护、缺相等保护。
6.3.7、零位保护功能:机构断电后,操作手柄必须回零后才能启动,防止误操作。
6.3.8、夹轨器:门机设有夹轨器,当夹轨器夹上时,夹轨限位常闭接点断开,禁止大车行走机构运行,夹轨器与大车行走互锁。
6.3.9、风速仪:门机设有一台风速仪,显示风速,测量精度±5%。仪表装于司机室,当风速超过设定速度时,联动控制台上的指示灯闪亮。大车停止运行。
1.1、PLC系统是整机的逻辑控制中心,降低系统的故障出现机率、提高系统安全保护能力是PLC控制系统的**。
基此考虑,通过下述措施提高系统的可靠性:
1.2、 PLC系统采用西门子公司S7-1200系列产品,质量具有高度可靠性;同时PLC供电采用专用隔离变压器再经直流开关电源供电,可有效消除外部电源的干扰,有效保证PLC系统供电的安全性。
1.3、门机电气室设置一套PLC控制器,通过PROFIBUS DP总线对各机构的变频器,进行控制及数据采集,司机室PLC、小车机房PLC均采用分布式I/O,通过PROFIBUS DP把数据传送给PLC控制器,把控制信号传递给PLC控制器。整体控制可靠性高,故障率低。
1.4 、PLC为门机提供可靠的保护功能:司机室操作指令、各机构限位开关、起升机构载荷信号、各机构制动器反馈信号、各回路空开关合闸信号、各回路接触器反馈等均进入PLC进行处理,从而可以使门机的安全操作得到可靠保证。
1.5、PLC控制系统的使用使得门机的控制和操作更加灵活、便利,通讯总线的采用使各电气设备联系更加简单,而数据信息交换量更大。
1.6、除软件保护外,重要环节同时实现硬件安全互锁功能,确保安全性。
2.2、PLC收集门机系统当前状态来确定用户的指令是否有效;
2.3、如果指令有效(系统无故障,并且工作模式正确),PLC向变频器发出启动命令;
2.4、起升机构工作,制动器开闸前,变频器内部将根据负载自动进行预加力矩控制,以确保重物在开闸时不会“溜钩”;
2.5、预加力矩到达后,打开制动器,制动器打开信号反馈给PLC和变频器,这时速度输出指令开始工作,电机运转;
2.6、电机运动以后如有故障出现,PLC将会进行停车过程处理,该过程取决于出现的故障的严重性,该故障亦将显示在司机室触摸屏上。PLC记录故障后,操作者可以按“复位”按钮清除故障,并再按下“合闸”使机构重新上电。
2.7、当司机在正常状态(主令回零),机构将进行电气制动,在制动器关闭前,变频器的运行速度将按斜坡逐渐变为零。
停车程序分为三级控制:
3.1、一级停车程序(紧急停车):当机构发生如电机超速、调速器故障、快速熔断器损坏、急停开关被按下等紧急情时,系统将不进行电气制动,而直接进行机械制动,关闭机构的运行。
3.2、二级停车程序(极限停车):当机构达到工作极限,如停车限位动作、起升超重等时,系统将自动执行二级停车程序,PLC发出快速停车指令,并快速关闭制动器电源,这个过程是电气制动结合机构制动的快速停车过程,可以使机构安全快速停车。
3.3、三级停车程序(正常停车):在门机正常状态下对机构进行电气制动(按变频器预设的正常减速曲线)的停车,停车过程平稳无冲击。
4.1、当门机电气系统软、硬件发生故障时,PLC系统根据逻辑关系,可自动分析故障位置及故障原因。
2.1.1、铁路起重机械安全系统由视频监控系统、数据监控系统、本地监控主机、网络传输设备、远程监控平台等五个部分组成。
2.1.2、视频监控系统:采集和存储设备视频信息并在司机室内进行视频显示,为司机操作和设备定位提供帮助,通过网络传输单元把视频信息传输到本地监控主机和远程监控平台;
2.1.3、数据监控系统:分为安全监控和电气监控,通过PLC采集起重机相关安全监控数据和电气监控数据,在司机室通过触摸屏显示设备安全监控和电气监控实时状态,方便用户进行现场故障检修,通过网络传输单元把安全监控数据和电气监控数据传输到本地监控主机和远程监控平台;
2.1.4、本地监控主机:采用联想商务机作为监控主机,配置网络机柜和UPS,监控主机放置在货运值班室,值班人员可以通过监控主机的视频信息和数据信息进行查看货场所有起重设备的运行状况;
2.1.5、网络传输设备:网络传输设备进行采集门机视频信息和数据监控信息,通过无线传输方式传输到本地监控主机,再经过网络将数据传输到远程监控平台;
2.1.6、远程监控平台:远程监控平台具有设备视频监控、安全与状态监测、故障智能诊断、远程设备维护、维修计划管理、设备管理、作业管理、信息自动推送等功能,相关设备管理人员可以通过远程监控平台的视频信息和数据信息在办公室查看所管辖内的起重机的运行状况;
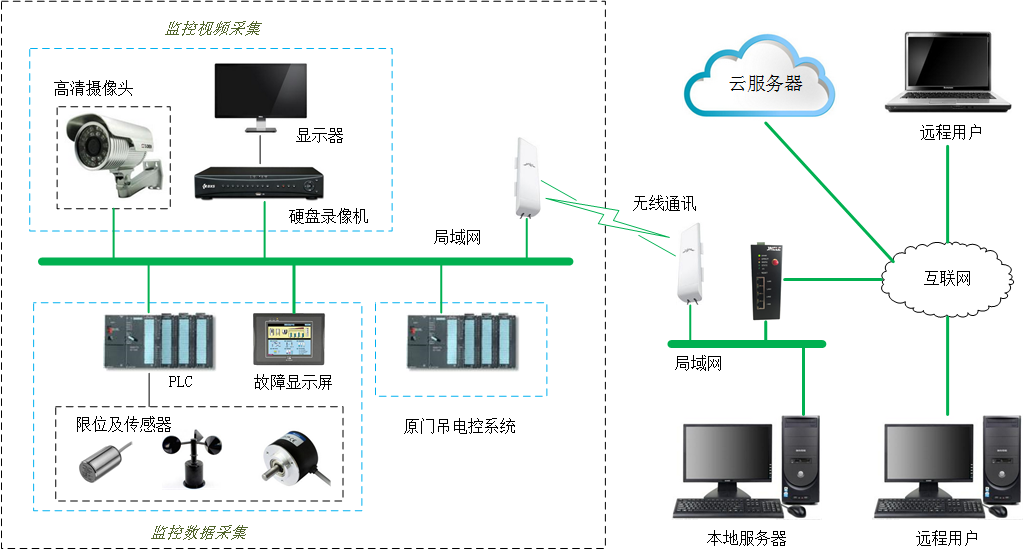
图2:网络拓扑图
3、视频监控系统
3.1、视频摄像机采用海康威视网络摄像机,具有夜视功能,像素为200万像素,监控区域包括吊钩、小车机房、电气房、司机室、门吊行走区域(4个)、集装箱落锁位置。
3.2、在司机室安装硬盘录像机,用以存储视频所有资料。
3.3、在司机室安装19寸液晶显示器,显示器和硬盘录像机连接,显示器显示所有视频图像,并且可以通过鼠标选择画面进行放大。

图3:视频网络拓扑图

图4:现场案例
4、数据监控系统
4.1、数据监控系统分为安全监控和电气监控两部分,安全监控参考《GBT28264-2012 起重机安全监控管理系统》所规定监控参数、监控状态以及相关监控要求进行采集相关数据和数据分析。电气监控通过通讯采集原电控系统PLC相关数据,主要包括变频器状态和PLC的IO状态,安全监控系统不修改原电控程序。
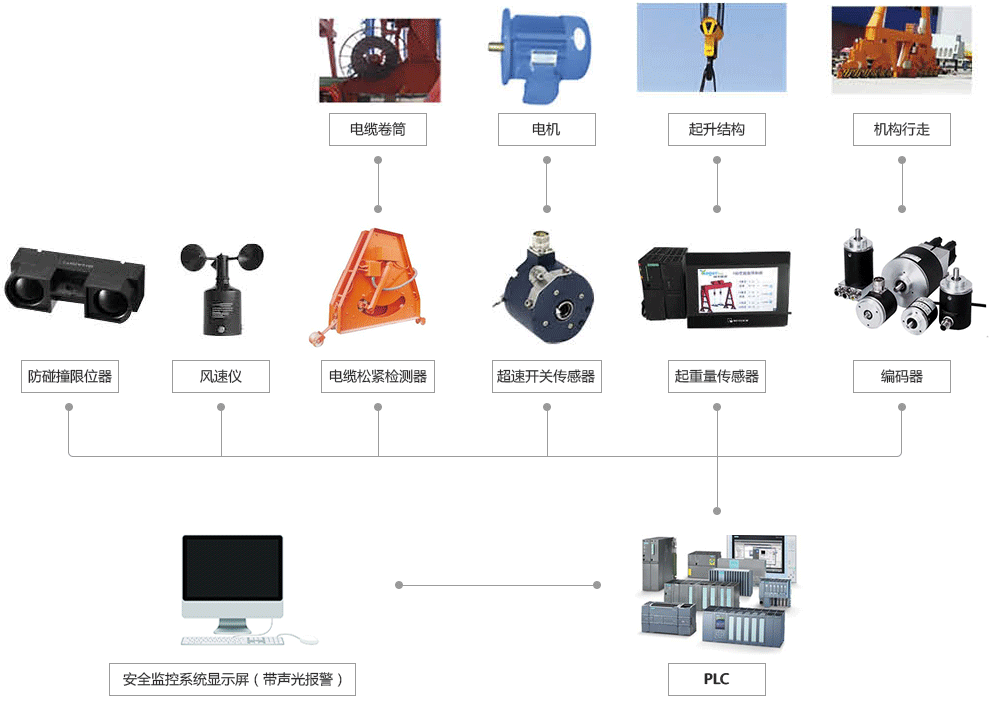
图5:数据监控网络拓扑图

图6
序号 | 监控内容 | 实施要求 |
1 | 起重量 | 通过起重量仪读取 |
2 | 风速 | 通过风速仪表读取 |
3 | 起升高度、大车小车运行行程 | 采用德国倍加福或库伯乐绝对值编码器 |
4 | 限位(起升限位、大小车限位、门限位、锚定限位、夹轨器限位) | 通过电气系统采集 |
5 | 起升制动器检测 | 加装检测装置,检测制动器的工作状态及闸皮磨损状态及通过电气系统采集 |












