起重机防摇、防啃轨控制系统
发布:hnhjgk0.1浏览:18212次
基于交流变频器西门子s120的控制器(cpu310-2)
可以用在大车、小车机构上
手动模式下可实现防要求
可以通过Orofibus-DP通讯控制或者I/O控制
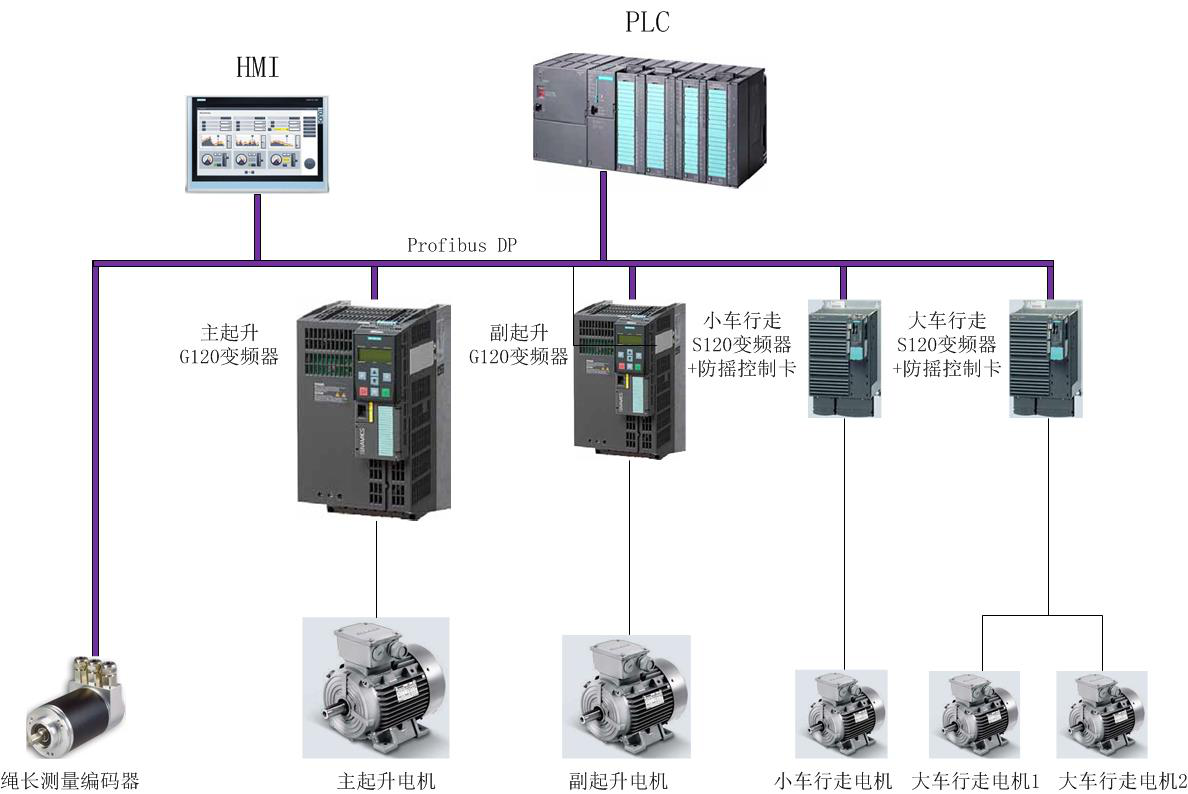
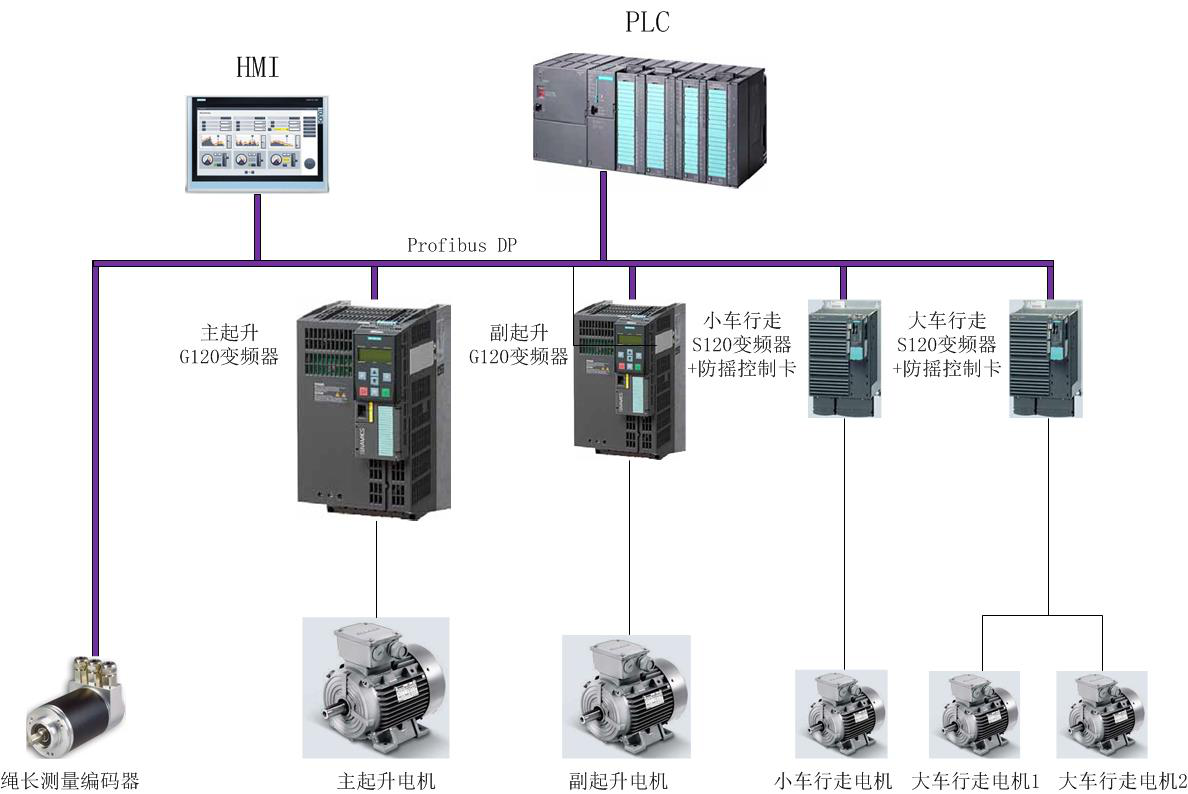
方案图
起重机防啃轨装置(直线运动控制器)
未安装防啃轨装置
钢铁冶炼厂及中机车轮轮缘与轨道频繁接触(肯轨道)
造成车轮严重磨损
财物损失:
1、每台起重机每两个月更换车轮;
2、人工成本,移动起重机成本,车轮处理成本等;
3、打断钢铁生产;
4、大型起重机停机时间达24小时;
5、每次停机造成损失,6.000€/h。
安装直线运动控制器后:
1、直线运动控制,保持体重机运行在轨道中心;
2、非接触式传感器测量起重机运行过程中轨道和车轮之间的偏差;
3、利用这个测量的偏差数据,控制器计算出两边驱动各自的速度;
4、正常中心线跟踪精度±5mm;
5、车轮轮缘与轨道没有接触。
五年之中,不再有任何车轮更换要求!












